Human Intrusion Detection in Static Hazardous Areas at Construction Sites: Deep Learning–Based Method
Xinyu Mei1, Xiaojing Zhou2, Feng Xu3, Zhipeng Zhang4
1Undergraduate Research Assistant, School of Naval Architecture, Ocean and Civil Engineering, Shanghai Key Laboratory for Digital Maintenance of Buildings and Infrastructure, Shanghai Jiao Tong University, 800 Dongchuan Road, Shanghai, P. R. China. Email: 1749496562@qq.com
2Undergraduate Research Assistant, School of Naval Architecture, Ocean and Civil Engineering, Shanghai Key Laboratory for Digital Maintenance of Buildings and Infrastructure, Shanghai Jiao Tong University, 800 Dongchuan Road, Shanghai, P. R. China. Email: stuttering511@sjtu.edu.cn
3Associate Professor, School of Naval Architecture, Ocean and Civil Engineering, Shanghai Key Laboratory for Digital Maintenance of Buildings and Infrastructure, Shanghai Jiao Tong University, 800 Dongchuan Road, Shanghai, P. R. China (Corresponding Author). Email: F.Xu@sjtu.edu.cn
4Assistant Professor, School of Naval Architecture, Ocean and Civil Engineering, Shanghai Key Laboratory for Digital Maintenance of Buildings and Infrastructure, Shanghai Jiao Tong University, 800 Dongchuan Road, Shanghai, P. R. China. Email: zp.zhang@sjtu.edu.cn
Submitted on February 16, 2022; approved on July 21, 2022; published online on October 22, 2022. Discussion period open until March 22, 2023
研究亮点Highlights
•The meaning of human intrusion in a static hazardous area was defined.
•A method to determine the positional relationship between people and static hazardous areas was proposed, and a test optimization mechanism was introduced.
•An intrusion direction judgment module and intrusion posture judgment module were developed and introduced.
•An intrusion rule base was constructed, which is composed of specific rules with different sensitivities.
摘要
施工工地环境复杂,事故发生率较高,而人员侵入危险区域是导致事故发生的直接原因。传统施工安全管理主要依靠安全员巡查等以人工为主的方式,耗时耗力,且难以实现全过程全覆盖的安全监管。以计算机视觉为代表的人工智能技术的出现,为危险区域侵入的监管提供了新的方案。但目前已有的研究对静态危险区域人员侵入判断的方法较为单一,主要以人员与危险区域面积重叠情况作为依据,没有深入考虑人员侵入的姿态、方向等因素的影响。对此,本文中开发了一种基于计算机视觉的人员危险区域侵入检测方法,主要针对静态危险源的场景。施工人员的目标检测基于YOLO V5模型实现,从而提取图像特征信息。然后制定基于检测框关键点的侵入判断基本规则,并引入两个辅助检测模块来识别工人侵入的方向和姿态。最后,构建起侵入规则库作为危险区域人员侵入识别的依据,它包含针对人员不同的侵入状态的灵敏度不同的侵入判断规则。实验表明算法检测的精确率、召回率分别达到96.05%和90.05%,证明本方法可以有效弥补施工工地安全管理中人工监管的缺陷,从而降低事故发生概率。
Abstract
Construction sites have complex environments and high accident rates. Human intrusion into static hazardous areas is a significant cause of accidents. Traditional engineering safety management mainly relies on manual methods, such as patrol inspection by safety supervisors, which is time-consuming and labor-intensive, and it is difficult to achieve a complete safety supervision. In recent years, the emergence of artificial intelligence technology and computer vision has provided a new scheme for intrusion detection. However, existing studies have used a single method for human intrusion judgment in static dangerous areas, without in-depth consideration of the influence of human posture, intrusion direction, and other factors. In this study, a computer vision-based intrusion detection method was developed, mainly aimed at static hazardous areas. The object detection was based on the You Only Look Once (YOLO) V5 module to extract the image feature information. Subsequently, the basic rule of intrusion judgment based on the key points of bounding boxes was formulated, in which the workers’ intrusion direction was recognized and postured using two auxiliary detection modules. Finally, the intrusion rule base was constructed as the basis for human intrusion detection, containing rules with different sensitivities for different intrusion states. The case study indicated that the precision and recall rate of the algorithm were 96.05 and 90.05 %, respectively. Overall, this method can effectively address the defects of manual supervision in engineering safety management, thus reducing the probability of accident occurrence and enhancing safety at construction sites.
Keywords:Hazardous areas; Intrusion detection; Intrusion posture; Machine vision; YOLO V5; Deep learning
图表Graphics
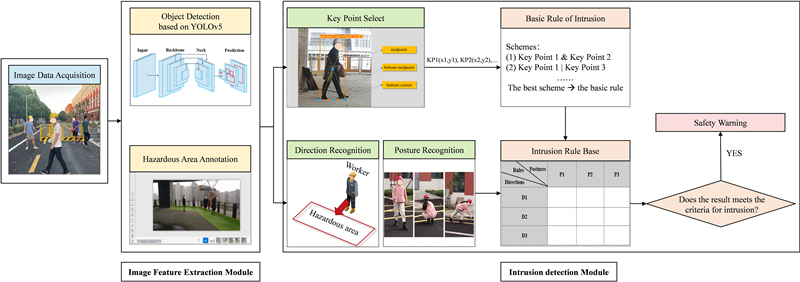
图1. 研究技术路线图
Figure 1. Schematic diagram of research technology route
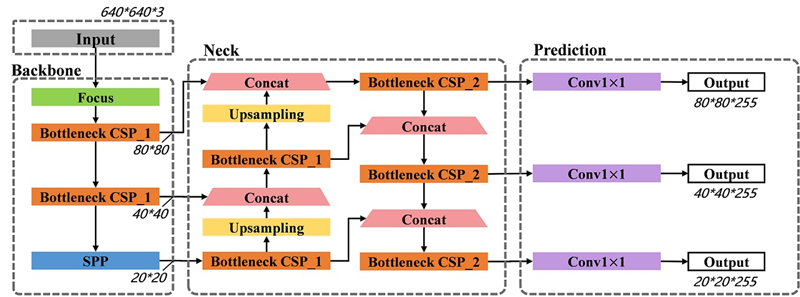
图2. YOLO V5算法架构
Fig.2. YoloV5 architecture
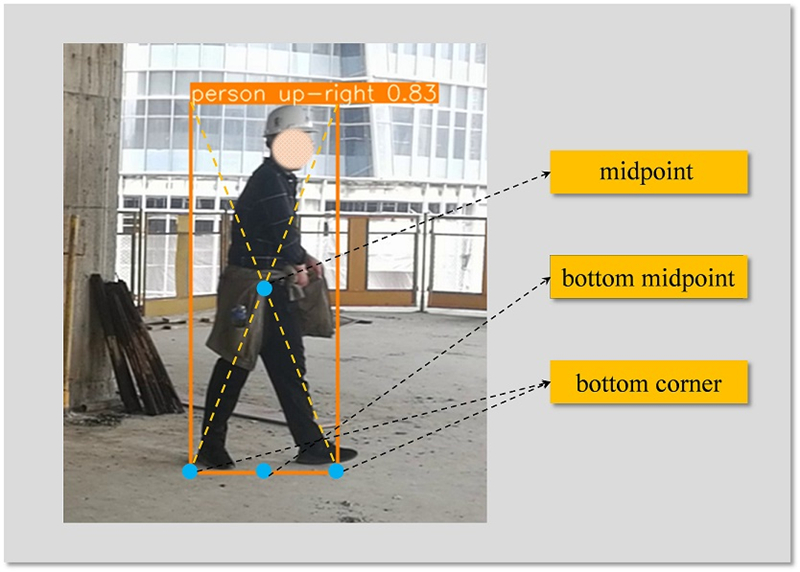
图3. 人体骨架关键点选取
Fig.3. Selection of key points
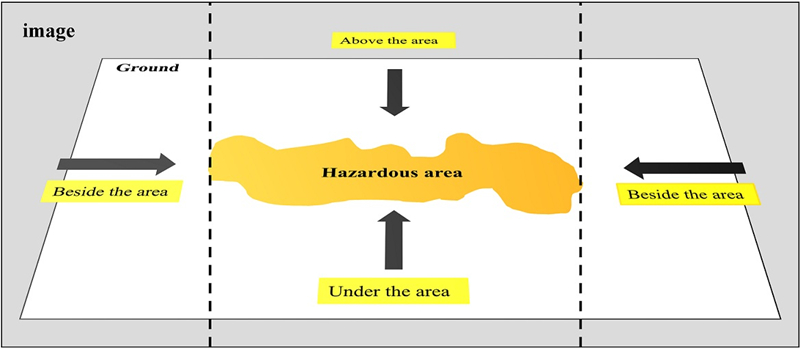
图4. 基于侵入方向的场地划分
Fig.4. Site division based on intrusion direction
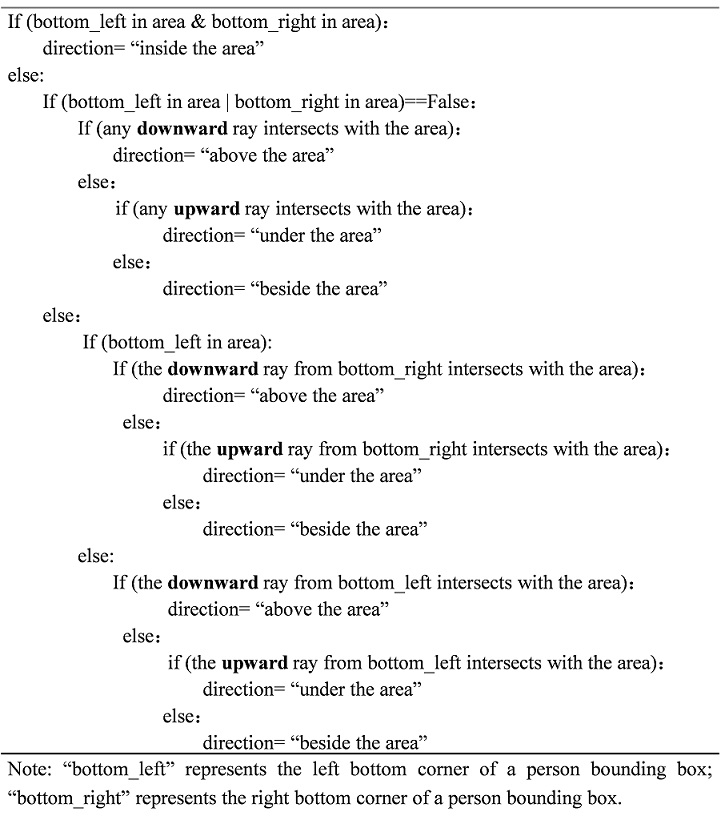
图5. 人员侵入方向判断流程
Fig.5. Pseudocode of human intrusion direction judgment
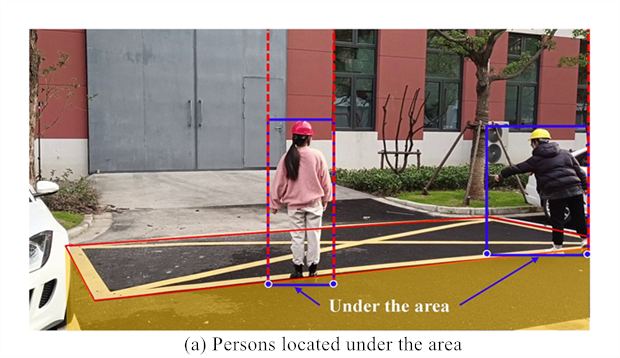
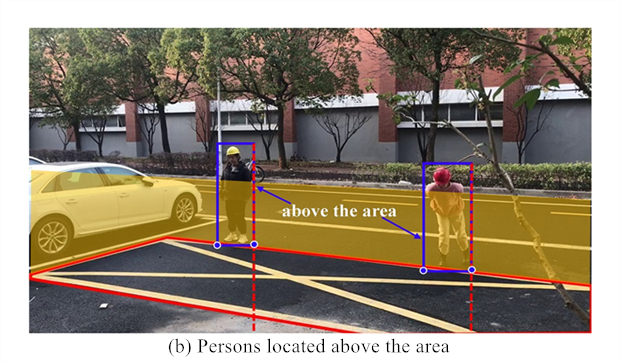
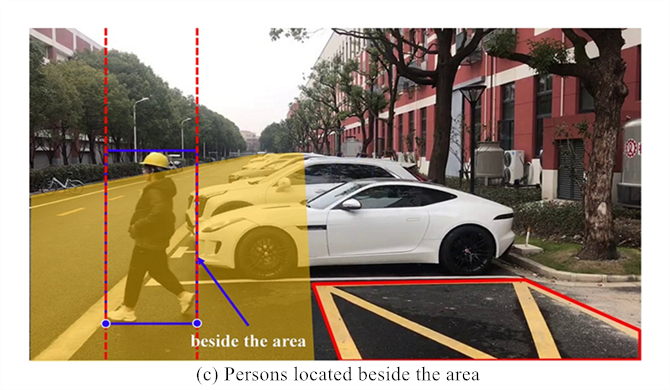
图6. 人员所在区域的分类
Fig.6. Classification of the area where persons are located
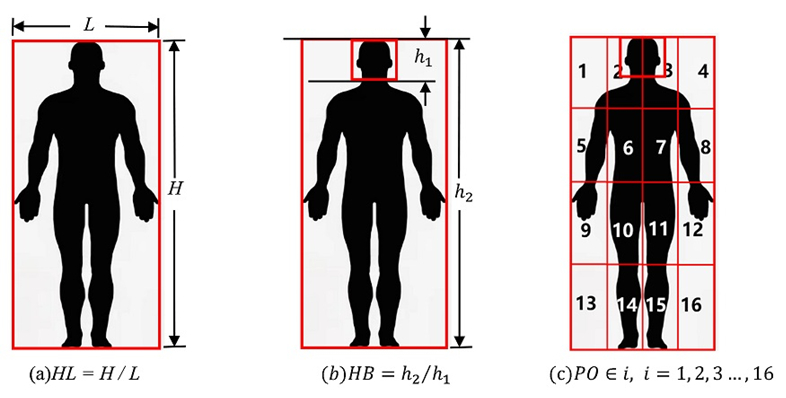
图7. 人员姿态判断的特征算子定义
Figure 7. Definition of characteristic operators
图8. 模型的测试集样本
Figure 8. Testing samples of models
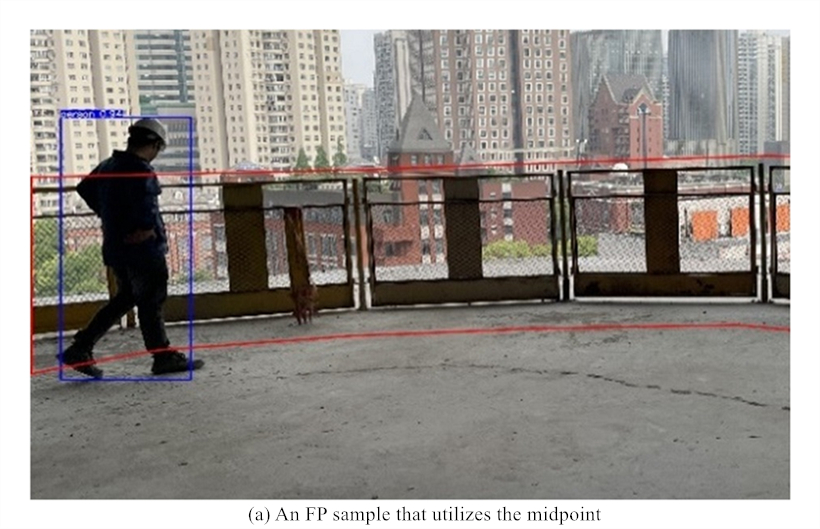
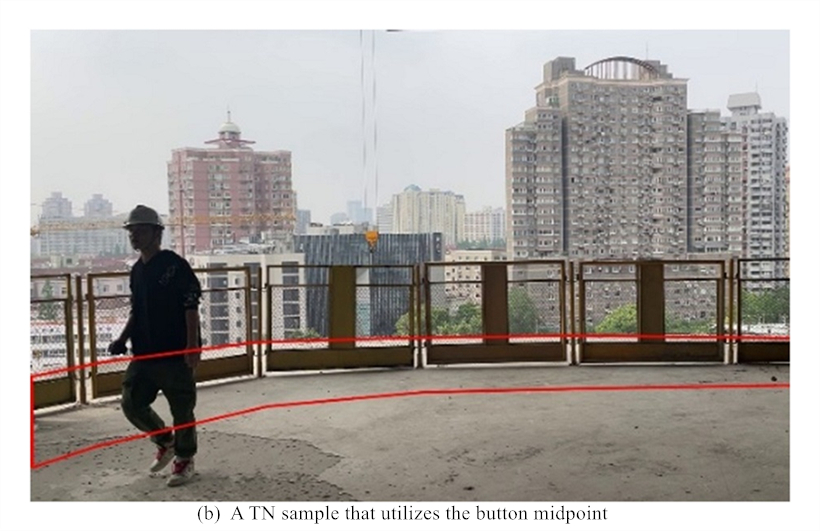
图9.不同关键点选择对透视问题的影响
Figure 9. The influence of choosing different key points on the perspective problem
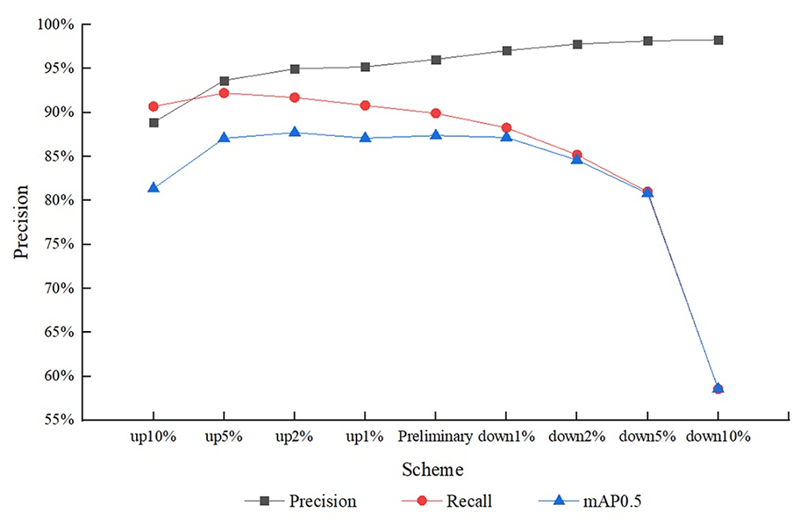
图10.实验结果折线图
Figure 10. Line chart of the test results
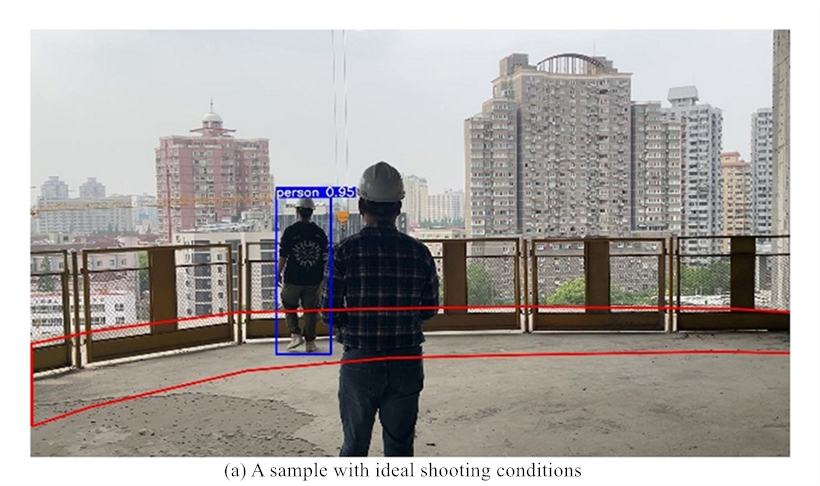
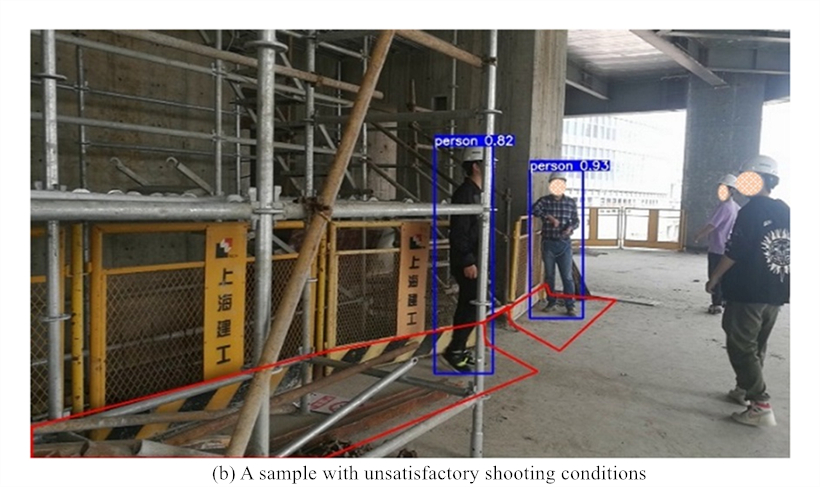
图11. 拍摄条件对比
Figure 11. Comparison of shooting conditions
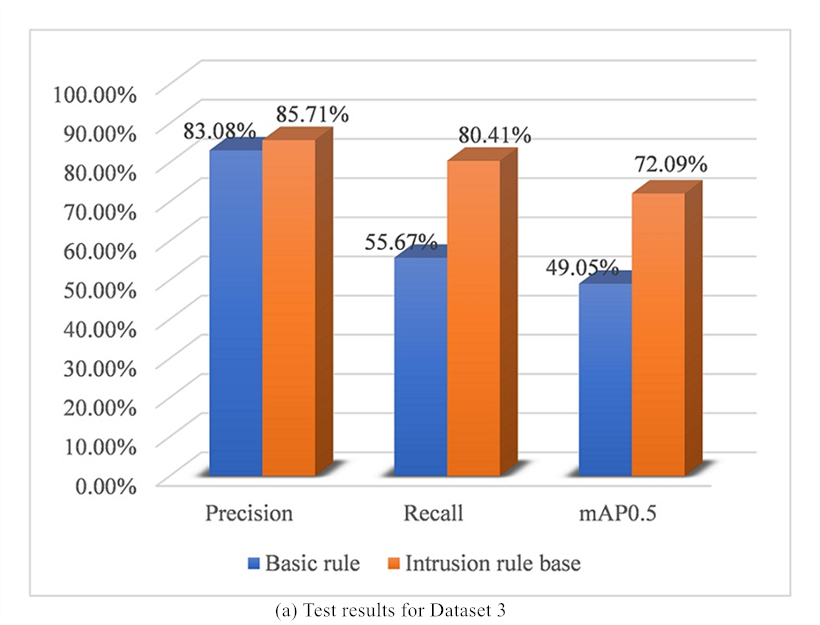
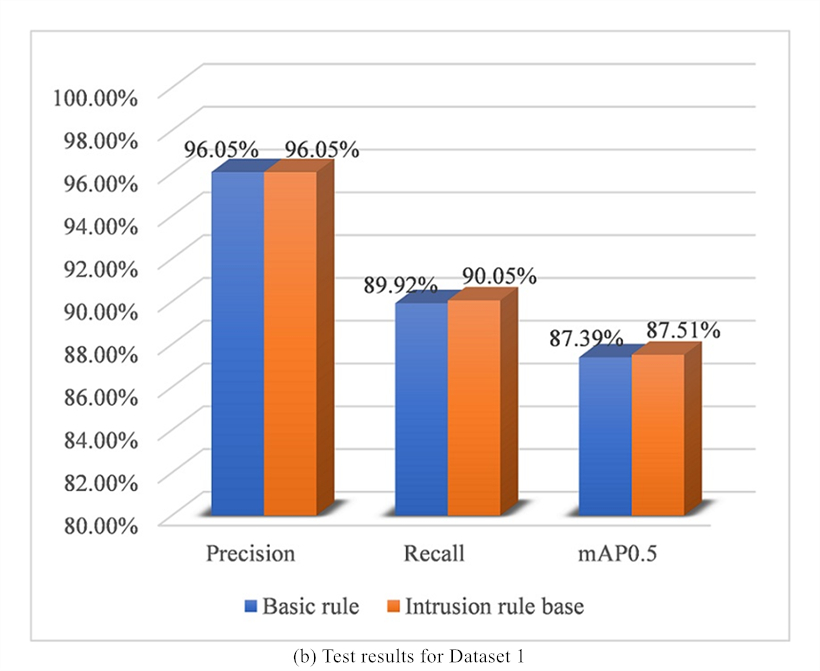
图12. 数据集3和1的测试结果
Figure 12. Test results for Dataset 3 and Dataset 1
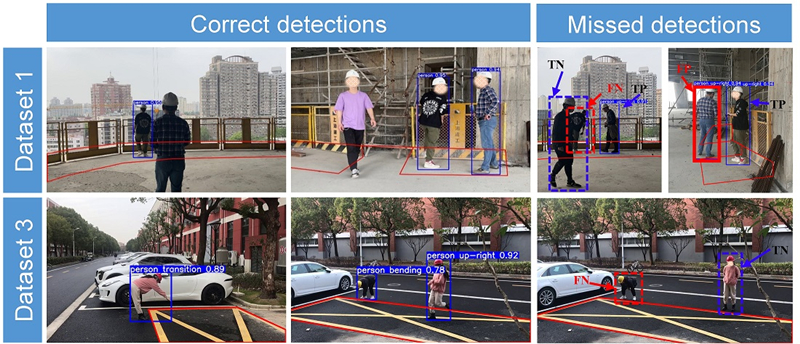
图13.检测结果样本展示
Figure 13. Examples of detections
原文链接:https://ascelibrary.org/doi/10.1061/%28ASCE%29CO.1943-7862.0002409
关于Journal of Construction Engineering and Management
《Journal Of Construction Engineering And Management》是一本专注于结构与建筑技术领域的English学术期刊,创刊于1983年,由ASCE-AMER SOC CIVIL ENGINEERS出版商出版。该刊已被SCIE数据库收录,2021年影响因子为5.292。该刊的发文范围涵盖建筑结构与技术、工程管理等领域,旨在及时、准确、全面地报道国内外结构与建筑技术工作者在该领域的科学研究等工作中取得的经验、科研成果、技术革新、学术动态等。









 上海交通大学船舶海洋与建筑工程学院
上海交通大学船舶海洋与建筑工程学院